1 Year Warranty
1 Year WarrantyDescription
概观
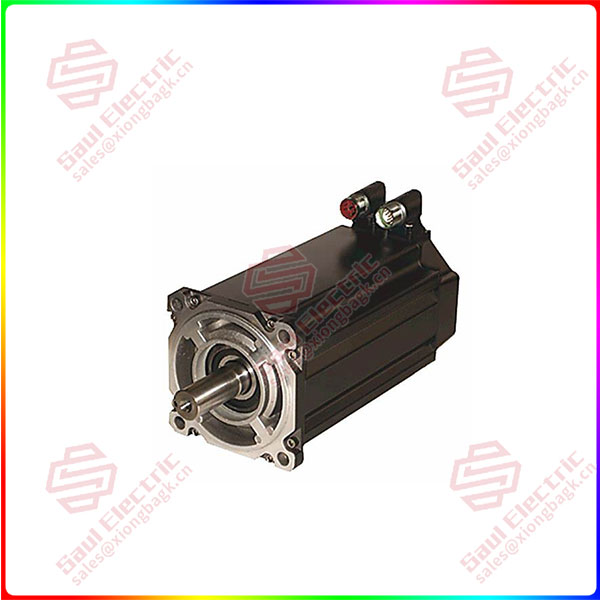
Essential details:MPL-B680B-M-X227 MP-Series Low-inertia Servo
Configuring a servo motor usually involves the following steps:
Determine the application requirements: First of all, it is necessary to clarify the application requirements of the servo motor, such as load type, load size, motion range, speed requirements, accuracy requirements, etc. These requirements will directly affect the selection of servo motors.
Select the right servo motor: According to the application needs, select the right type of servo motor. Factors that need to be considered include the rated power, rated voltage, rated current, maximum speed, maximum acceleration, etc.
Configure the drive: Select a suitable drive model and set the corresponding parameters. The driver is the key equipment to control the servo motor movement, which needs to set the correct control mode, pulse frequency, communication interface and other parameters.
Configure a feedback system: In order to achieve precise control, a feedback system needs to be configured, usually using encoders or sensors to detect the actual position and speed of the motor. It is necessary to select a suitable feedback sensor and configure the corresponding feedback mode and parameters.
Configure the upper controller: The upper controller is the core equipment to control the servo motor, you can choose PLC, motion controller or upper computer and other equipment. It is necessary to configure the corresponding control program and parameters to realize the communication and control with the servo motor.
Debugging and optimization: After the configuration is complete, it is necessary to debug and optimize to ensure that the movement of the servo motor meets the requirements of the application. This includes adjusting control parameters, optimizing motion trajectories, testing positioning accuracy, and so on.
MPL-B980C-MJ72AA
lf you need to inquire or purchase ,please send the product models to my email or call medirectly .
sunny He
[Email] sales@saulcontrol.com
[Mobile] 86-18059884797
[WhatsApp] 86-18059884797
[Skype] sales@saulcontrol.com
MPL-B680B-M-X227 MP-Series Low-inertia Servo